|
I am research scientist at State Key Laboratory of General Artificial Intelligence, Beijing Institute for General Artificial Intelligence(BIGAI), where I work on Robotics and Control. I received my B.S. degree from the School of Mechatronic Engineering, Harbin Institute of Technology in 2016, and the M.S. and Ph.D. degrees from the Department of Mechanical and Aerospace Engineering, University of California, Los Angeles in 2017 and 2021. I was adviced by Professor Dennis Hong in Robotics and Mechanisms Laboratory(RoMeLa) during my M.S. degree, and Professor Tsu-Chin Tsao in Mechatronics and Control Laboratory(MacLab) during my Ph.D. degree. Email / CV / Google Scholar / Research Gate / Chinese CV |

|
|
|

|
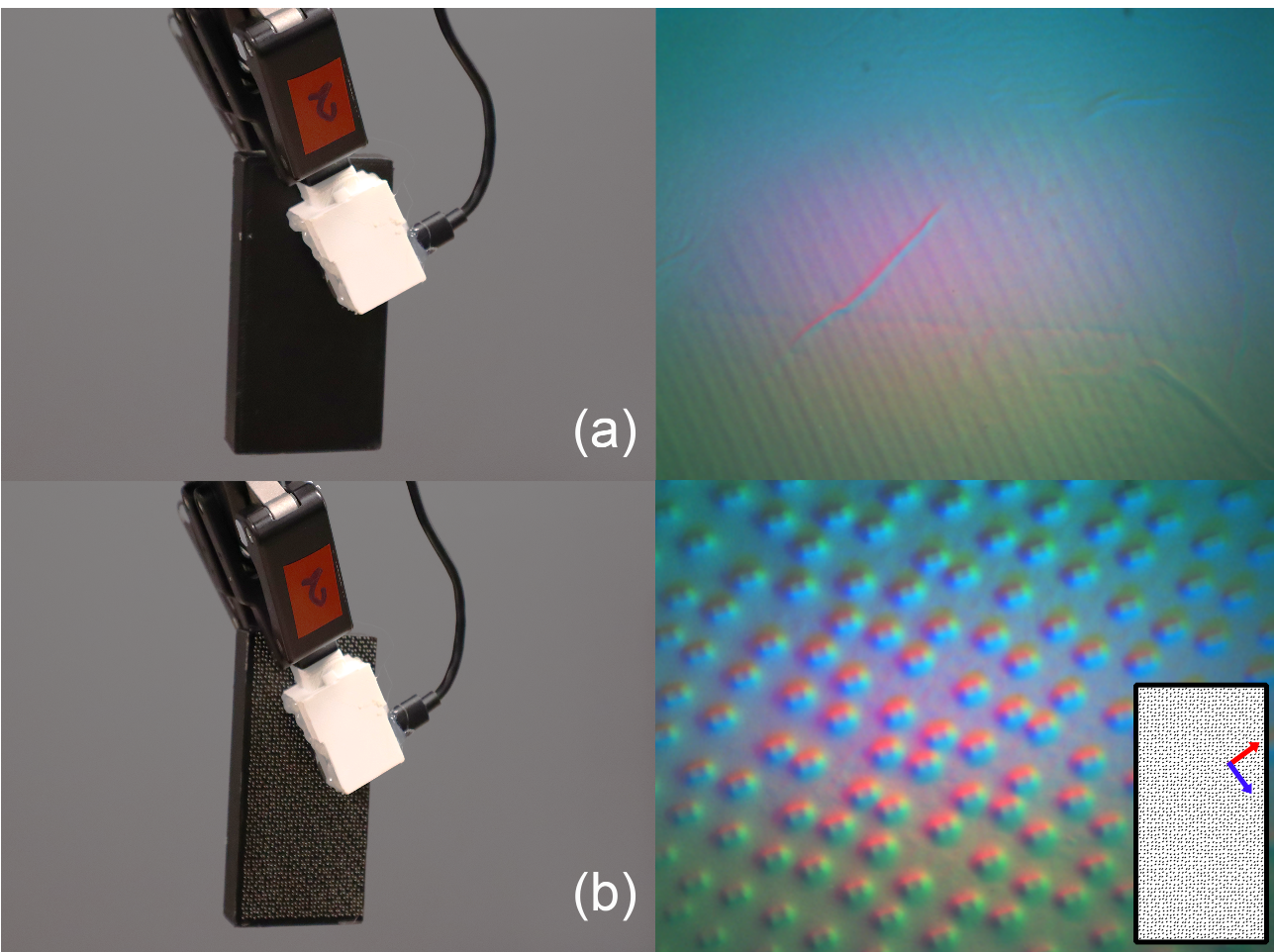
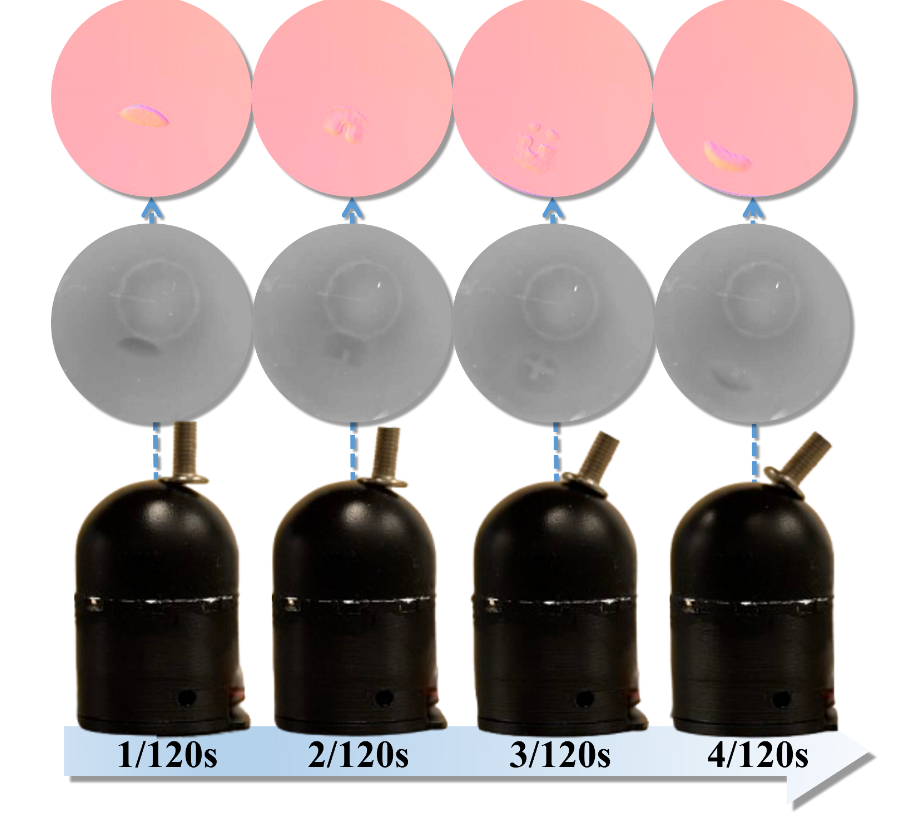
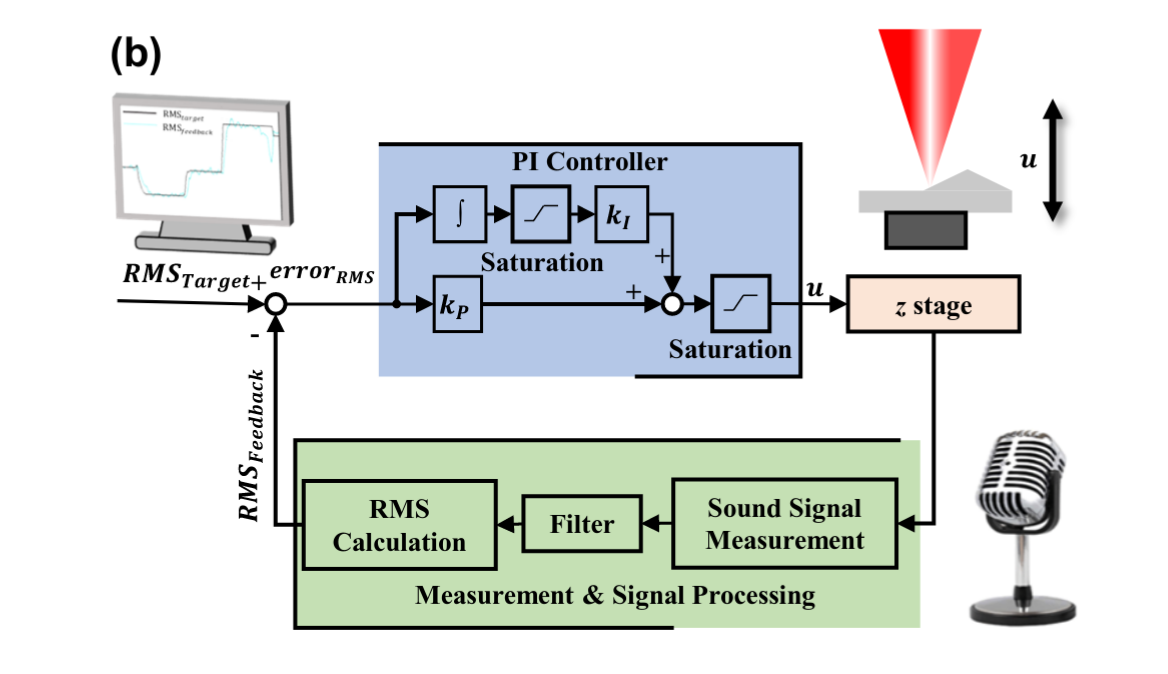
Yanzhe Fu, Yao Su, Jiayong Wei, Jianhua Zhu, Fei Li, Liangcheng Duan, Xiang Ding, Jiebo Li International Conference on UltrafastX (submitted), 2025 paper link |

|
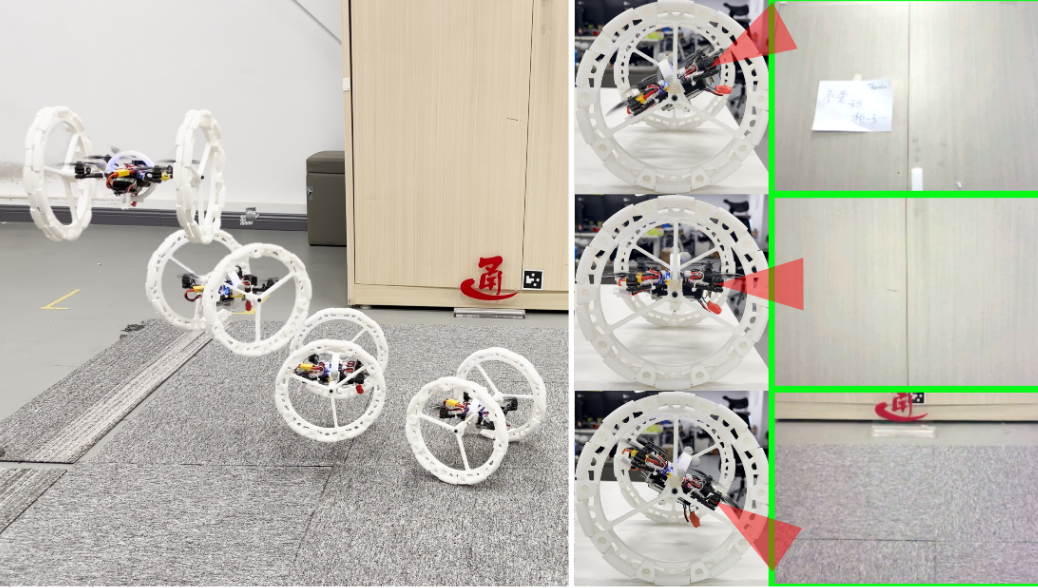
Lichan Qiao, Entan Sun, Xiaonan Song, Zhicheng He, Yao Su, Jingwen Zhang, Yibin Li, Guoteng Zhang IEEE/ASME Transactions on Mechatronics (TMECH) (submitted), 2025 paper link |
|
Qiang Wang, Jie Ren, Longchang Yu, Yue Wang, Jiayang Wu, Zhou Yang, Zhihao Yu, Fengwei Sheng, Fangtao Liu, Hongshuai Liu, Kefu Zhu, Lei Wang, Guangyuan Xu, Zhicheng He, Yao Su# IEEE Transactions on Automation Science and Engineering (T-ASE) (submitted), 2025 corresponding author paper link |

|
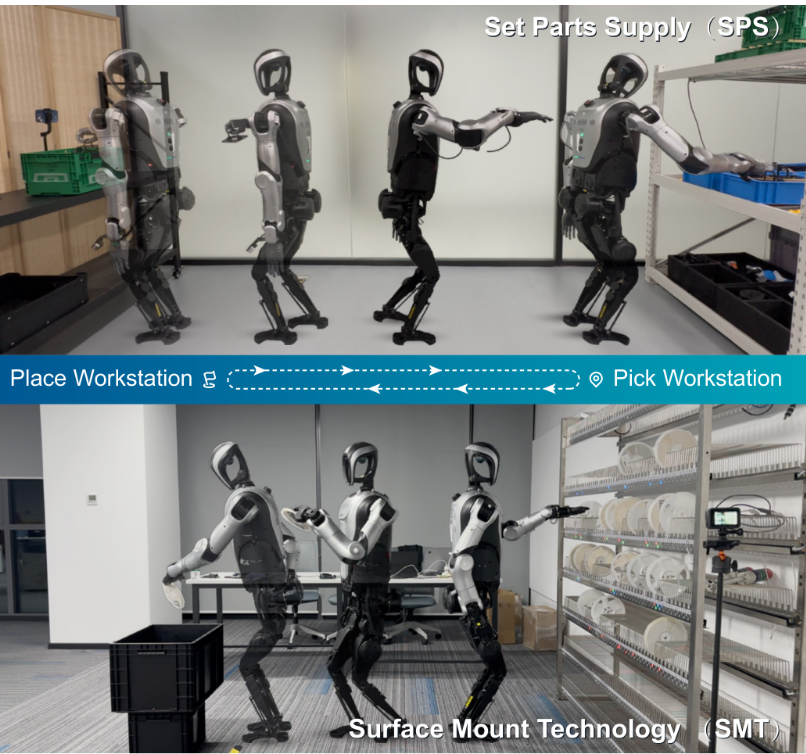
Shibowen Zhang, Jiayang Wu, Guannan Liu, Helin Zhu, Junhong Guo, Junjie Liu, Zhehan Li, Jiongye Li, Hangxin Liu, Jingwen Zhang, Jikai Wang, Zonghai Chen, Xiaokun Leng, Jiayi Wang, Yao Su# IEEE Robotics & Automation Magazine, 2025 corresponding author paper link |

|
Daoling Qin, Rui Song, Xiaonan Song, Zhicheng He, Yibin Li, Jingwen Zhang, Guoteng Zhang, Yao Su# IEEE Transactions on Industrial Electronics, 2025 corresponding author paper link |
|
Hao Liu, Hao Liang, Hang Li, Meng Wang, Hangxin Liu, Yao Su# IEEE/ASME Transactions on Mechatronics, 2025 corresponding author paper link |

|
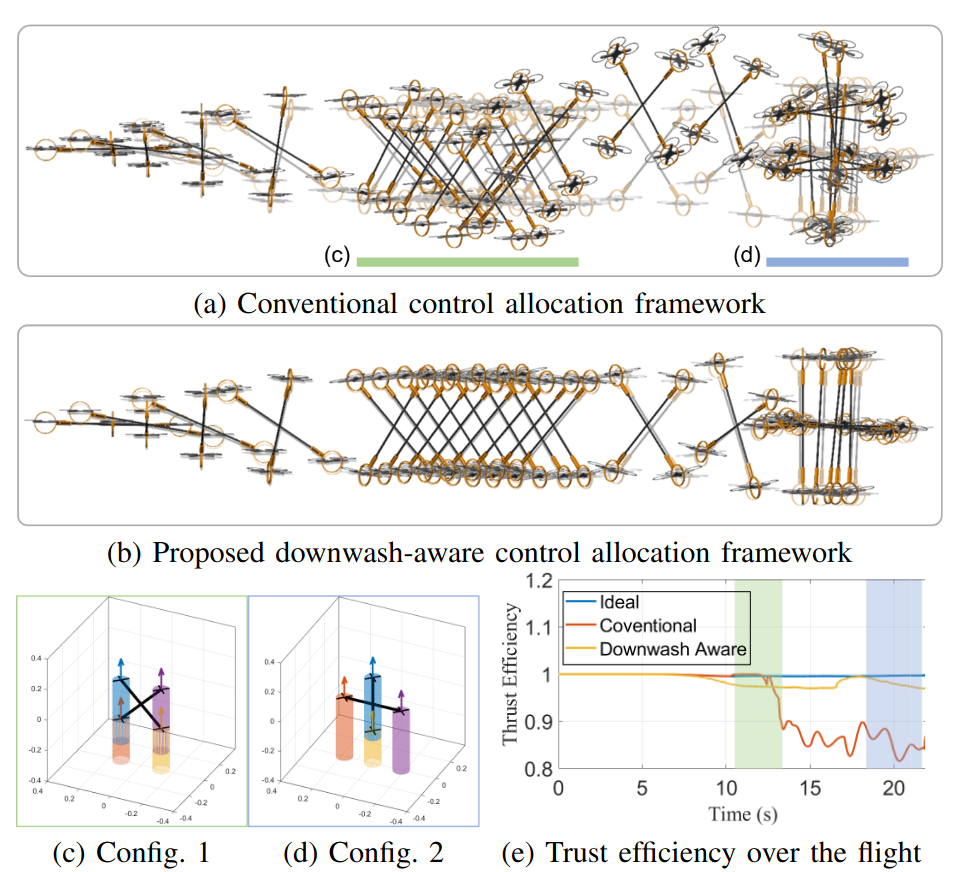
Jiayang Wu*, Jiongye Li*, Shibowen Zhang, Zhicheng He, Zaijin Wang, Xiaokun Leng, Hangxin Liu, Jingwen Zhang, Jiayi Wang, Song-Chun Zhu, Yao Su# IEEE Robotics and Automation Letters (RA-L), 2025 corresponding author paper link |
|
Meng Wang*, Wanlin Li*, Qiuxuan Chen,Yuzhe Huang, Hang Li, Kaspar Althoefer, Ziyuan Jiao, Yao Su#, Hangxin Liu# IEEE Robotics and Automation Letters (RA-L), 2025 co-corresponding author paper link |
|
Tingliang Zhang, Xinning He, Muzhi Han, Song-Chun Zhu, Yao Su#, Zhenliang Zhang#, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (submitted) , 2025 co-corresponding author paper link |
|
Han Gao, Zhaoyang Li, Kangjie Zhou, Kang Ding, Yao Su, Hangxin Liu, Shengbo Eben Li, Chang Liu# IEEE Transactions on Intelligent Transportation Systems (TSMC) (submitted), 2025 paper link |
|
|
|
Wanlin Li*, Pei Lin*, Meng Wang, Chenxi Xiao, Kaspar Althoefer, Yao Su#,Ziyuan Jiao#, Hangxin Liu# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2025 co-corresponding author paper link |
|
Yao Su, Ziyuan Jiao, Zeyu Zhang, Jingwen Zhang, Hang Li, Meng Wang, Hangxin Liu# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2024 first author paper link |
|
Meng Wang*, Wanlin Li*, Hao Liang, Boren Li, Kaspar Althoefer, Yao Su#, Hangxin Liu# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (oral), 2024 co-corresponding author paper link |
|
Yilue Qian, Peiyu Yu, Ying Nian Wu, Yao Su, Wei Wang#, Lifeng Fan# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2024 paper link |
|
Zhitian Li*, Yida Niu*, Yao Su, Hangxin Liu, Ziyuan Jiao# IEEE Conference on Industrial Electronics and Applications (ICIEA) , 2024 paper link |
|
Kangjie Zhou, Pengying Wu, Yao Su, Han Gao, Ji Ma, Hangxin Liu and Chang Liu# International Conference on Robotics and Automation (ICRA), 2024 paper link |
|
Yao Su*, Jingwen Zhang*, Hang Li, Meng Wang, Hangxin Liu# International Conference on Robotics and Automation (ICRA) , 2024 first author paper link |
|
Han Gao, Pengying Wu, Yao Su, Kangjie Zhou, Ji Ma, Hangxin Liu and Chang Liu# IEEE American Control Conference (ACC), 2024 paper link |
|
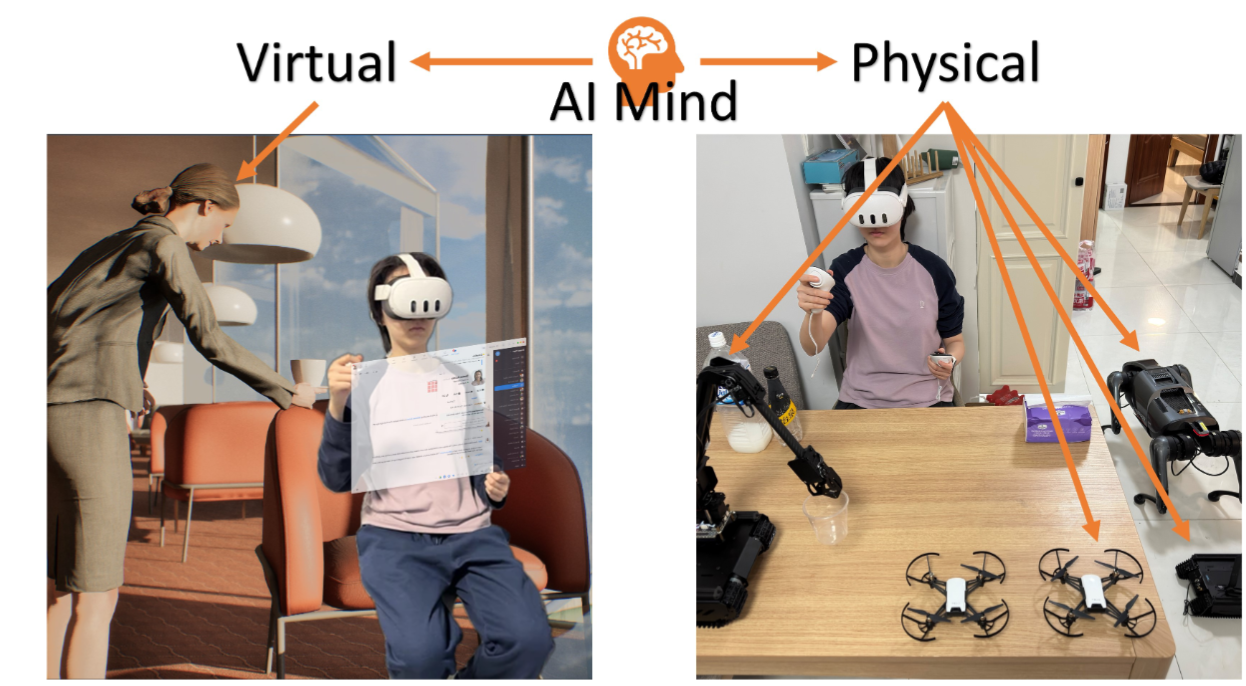
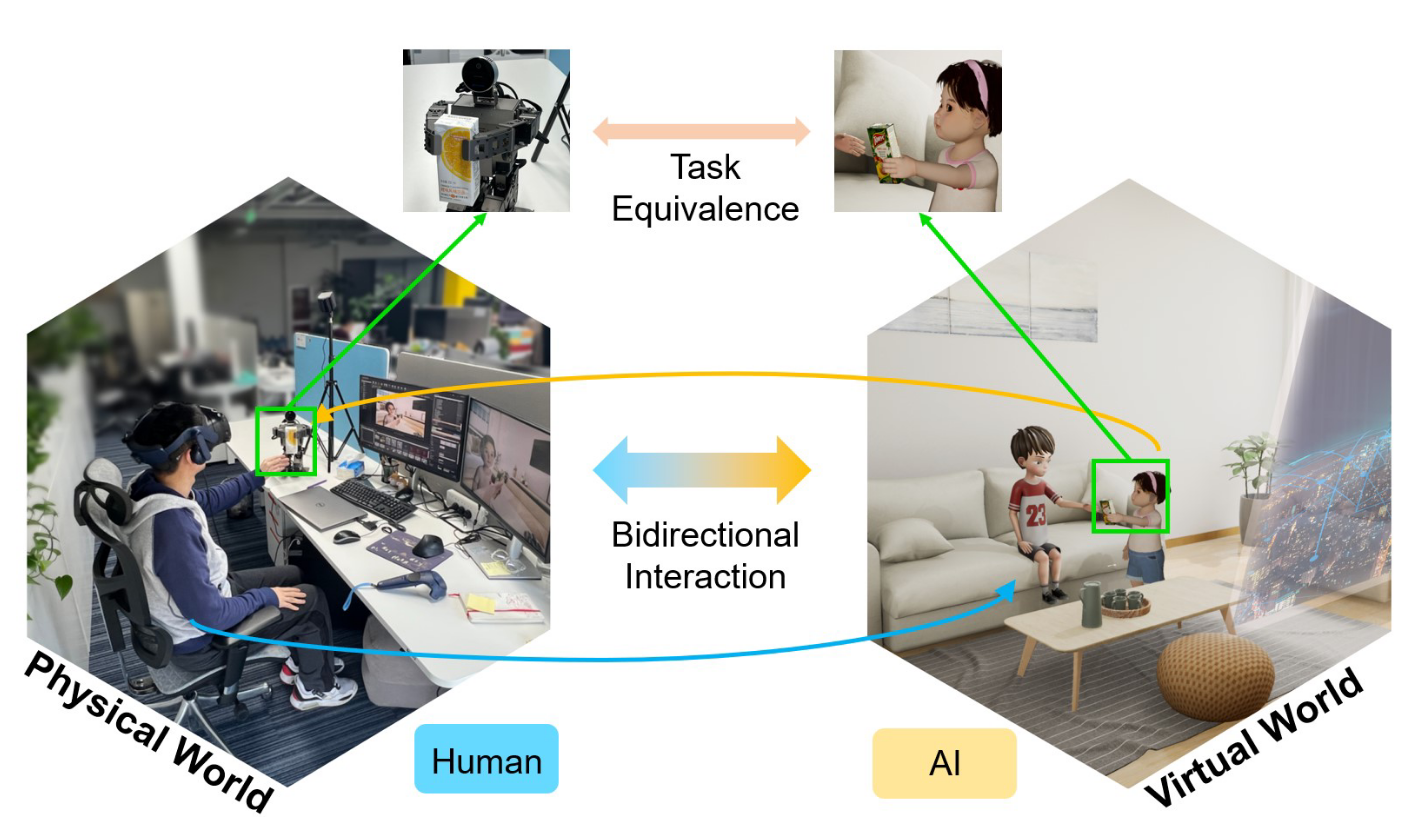
Zhenliang Zhang#, Zeyu Zhang, Ziyuan Jiao, Yao Su, Hangxin Liu, Wei Wang and Song-Chun Zhu# IEEE Conference on Virtual Reality and 3D User Interfaces (VR) , 2024 paper link |

|
Meng Wang*, Yao Su*, Hang Li, Jiarui Li, Jixiang Liang, Hangxin Liu# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2023 co-first author paper link / video |
|
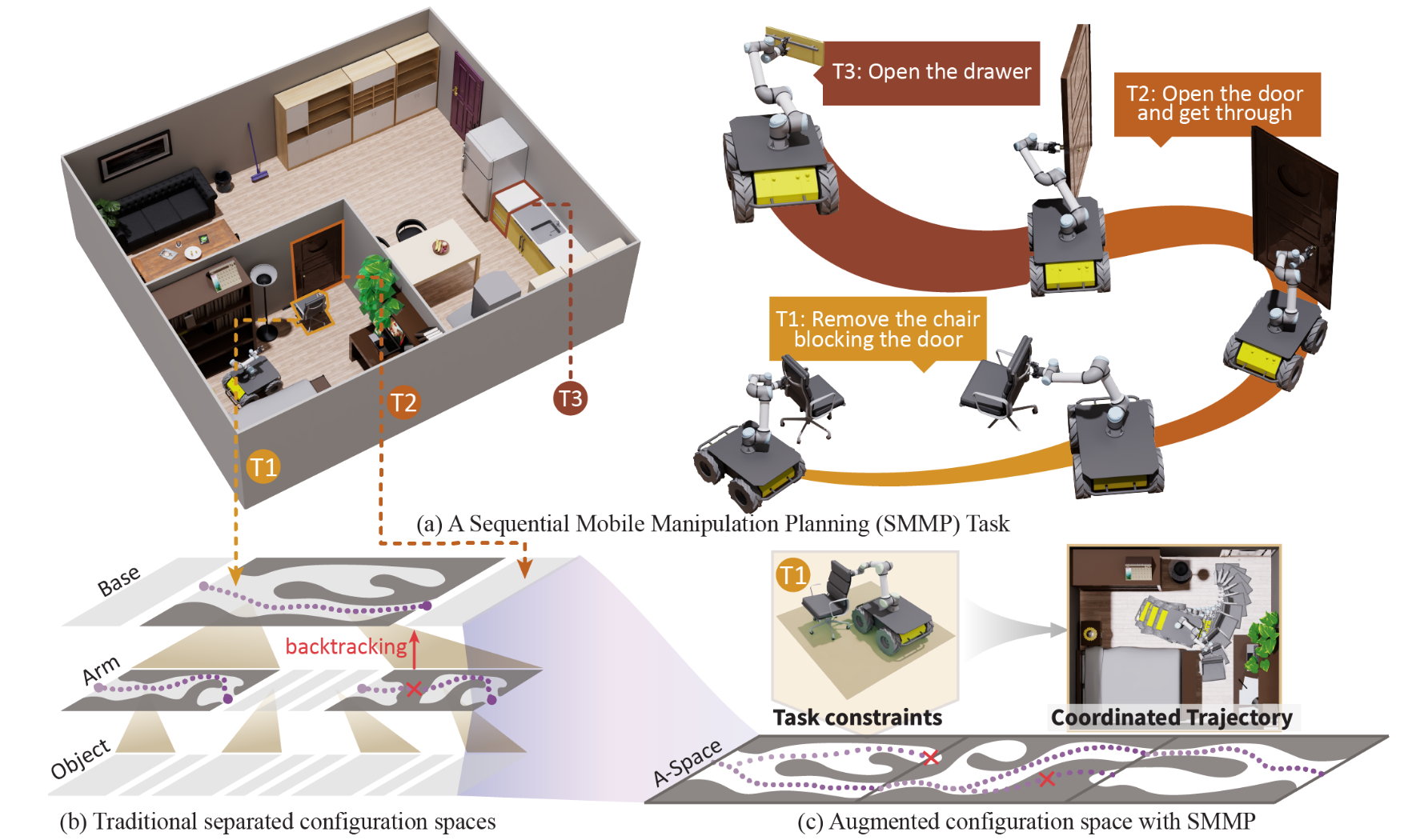
Yao Su*, Jiarui Li*, Ziyuan Jiao*, Meng Wang, Chi Chu, Hang Li, Yixin Zhu, Hangxin Liu# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2023 IROS 2023 Best Paper Award on Mobile Manipulation--Finalist! first author paper link / video |
|
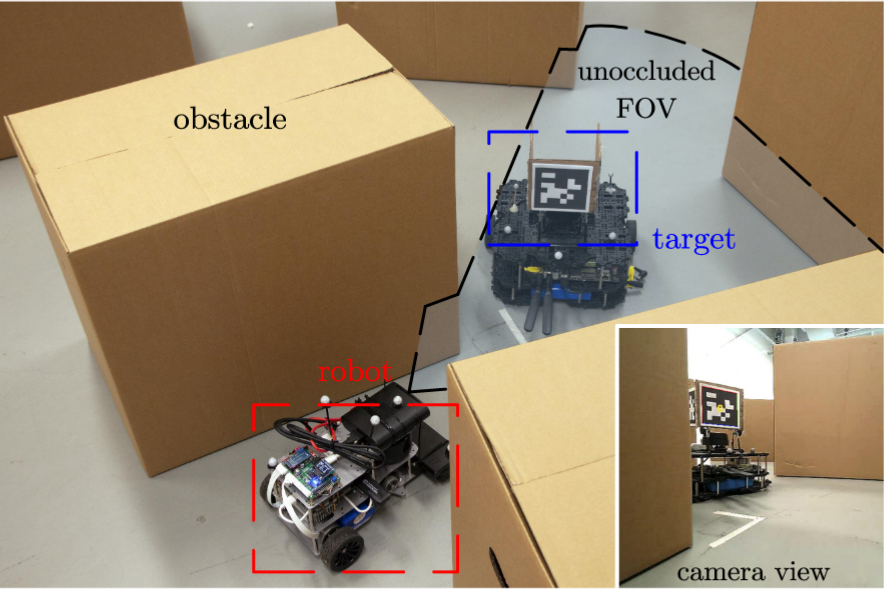
Yao Su*, Chi Chu*, Meng Wang, Jiarui Li, Liu Yang, Yixin Zhu, Hangxin Liu# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 first author paper link / video / web |
|
Chen-Huan Pi*, Lecheng Ruan*, Pengkang Yu, Yao Su, Stone Cheng, Tsu-Chin Tsao# IEEE Conference on Control Technology and Applications (CCTA), 2021 paper link |
|
Meng Wang, Yao Su, Hangxin Liu, Yingqing Xu# IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2020 paper link / video |
|
Xuan Lin, Hari Krishnan, Yao Su, Dennis W Hong# IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018 paper link / video |
|
|
|
Kangjie Zhou, Zhaoyang Li, Han Gao, Yao Su, Hangxin Liu, Junzhi Yu, Chang Liu# IEEE Transactions on Systems, Man, and Cybernetics (TSMC) , 2025 paper link |
|
Weidong Huang*, Jingwen Zhang*#, Xiaolong Hu, Jiongye Li, Shibowen Zhang, Jiayang Wu, Jiayi Wang, Song-Chun Zhu, Hangxin Liu, Yaodong Yang, Yao Su# IEEE Transactions on Automation Science and Engineering (TASE) (submitted), 2024 corresponding author paper link |
|
Ziyuan Jiao,Yida Niu, Zeyu Zhang, Yangyang Wu, Yao Su, Yixin Zhu, Hangxin Liu, Song-Chun Zhu IEEE Transactions on Robotics (TRO) , 2025 paper link |
|
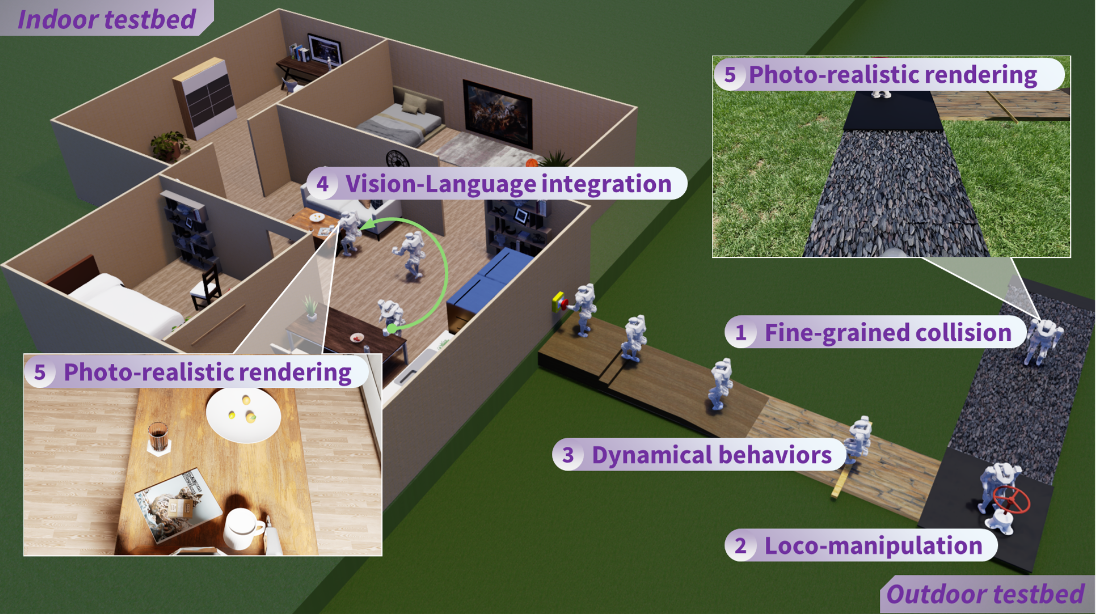
Hangxin Liu, Qi Xie, Zeyu Zhang, Tao Yuan, Song Wang, Zaijin Wang, Xiaokun Leng, Lining Sun, Jingwen Zhang#, Zhicheng He#, Yao Su# Journal of Field Robotics (JFR), 2025 corresponding author paper link |
|
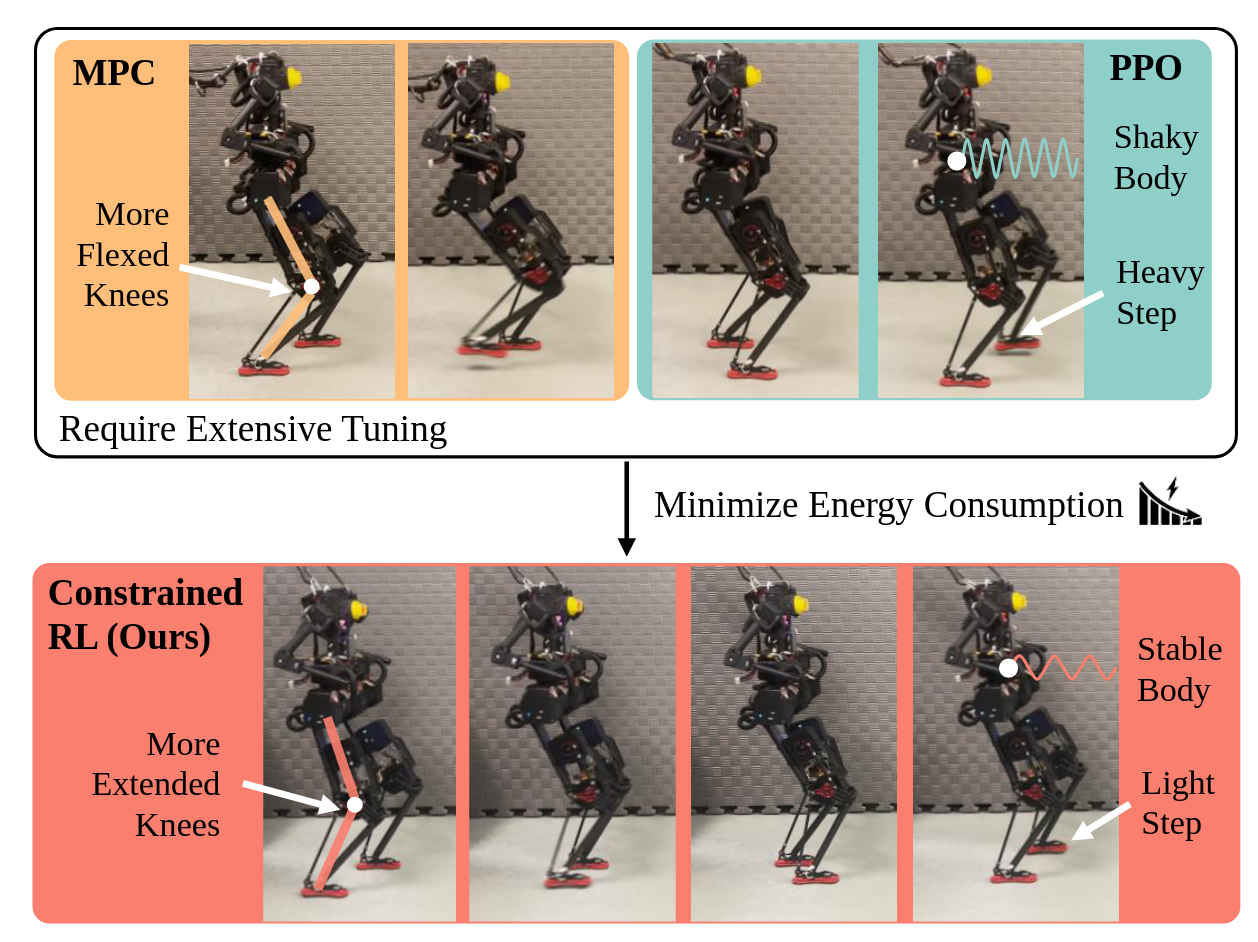
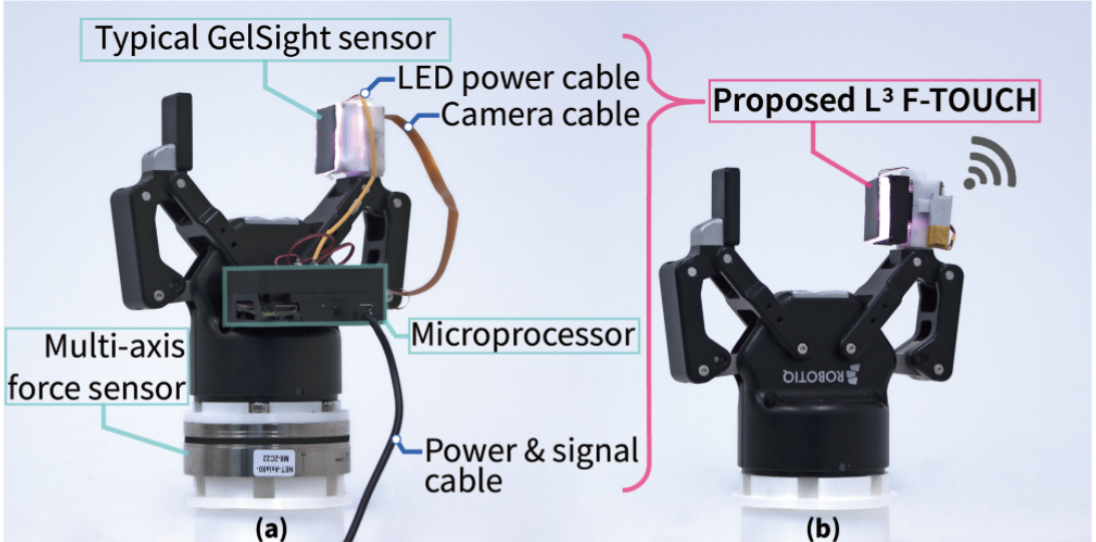
Zhicheng He, Jiayang Wu, Jingwen Zhang, Shibowen Zhang, Yapeng Shi, Hangxin Liu, Lining Sun, Yao Su#, Xiaokun Leng# IEEE Robotics and Automation Letters (RA-L), 2024 co-corresponding author paper link |
|
Yanzhe Fu, Yao Su, Jiayong Wei, Bing Wang, Jiebo Li# Optics Letters, 2024 paper link |
|
Pengkang Yu*, Yao Su*#, Lecheng Ruan, Tsu-Chin Tsao IEEE Robotics and Automation Letters (RA-L), 2023 co-first author, corresponding author paper link |
|
Wanlin Li*, Meng Wang*, Jiarui Li, Yao Su#, Devesh K. Jha, Xinyuan Qian, Kaspar Althoefer, Hangxin Liu# IEEE Robotics and Automation Letters (RA-L) , 2023 co-corresponding author paper link / video |
|
Yao Su*#, Pengkang Yu*, Lecheng Ruan#, Matthew J. Gerber, Tsu-Chin Tsao IEEE/ASME Transactions on Mechatronics (TMECH) , 2023 first author, corresponding author paper link / video |
|
Lecheng Ruan*#, Chen-Huan Pi*, Yao Su#, Pengkang Yu, Stone Cheng, Tsu-Chin Tsao Mechatronics, ELSEVIER, 2022 co-corresponding author paper link/ video |
|
Yao Su, Yuhong Jiang, Yixin Zhu, Hangxin Liu# IEEE Robotics and Automation Letters (RA-L)/ICRA, 2022 first author paper link / video / web |
|
Yao Su*#, Lecheng Ruan*, Pengkang Yu*, Chen-Huan Pi, Matthew J. Gerber, Tsu-Chin Tsao IEEE Robotics and Automation Letters (RA-L)/ICRA, 2022 first author, correspnding author paper link / video |
|
Yao Su*#, Pengkang Yu*, Matthew J. Gerber, Lecheng Ruan, Tsu-Chin Tsao IEEE Robotics and Automation Letters (RA-L)/IROS, 2021 first author, correspnding author paper link / video |
|
Pengkang Yu*#, Yao Su*, Matthew J. Gerber, Lecheng Ruan, Tsu-Chin Tsao IEEE Robotics and Automation Letters (RA-L)/IROS, 2021 co-first author paper link / video |

|
Jianwen Luo, Zelin Gong, Yao Su, Lecheng Ruan, Ye Zhao, H. Harry Asada, Chenglong Fu# IEEE Robotics and Automation Letters (RA-L)/ICRA, 2021 paper link / video |
|
Jianwen Luo, Yao Su, Lecheng Ruan, Ye Zhao, Donghyun Kim, Luis Sentis, Chenglong Fu# Robotica, 2019 paper link |
|
|
|
Yao Su UCLA Disseration, 2021 paper link |